开源六轴协作机器人教学平台
产品详情
开源六轴协作机器人教学平台JK-HS801
产品概述:
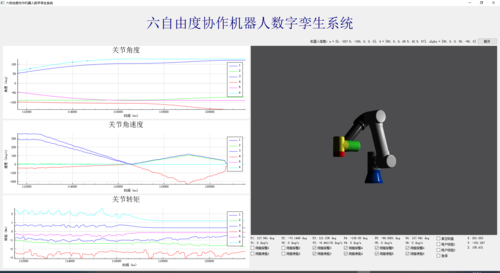
开源六轴协作机器人教学平台是一款基于一体化关节设计,结合机械臂运动学、动力学模型研发而成的教学及科研平台。该机械臂不仅满足机器人运动学、静力学、动力学等相关实验需求,用户可通过C语言或Simulink模型等方式设计自己的插补算法、伺服控制算法或逻辑控制算法,可实现串联关节机器人等控制对象的实验。控制器具备数据采集功能,可连续采集到实验过程的编码器计数(实际位置)、转矩指令值(电机转矩输出)、IO状态等数据,供分析和研究。

主要特点:
u 基于MATLAB开发,提供C语言模板、Simulink库、Matlab算法工具包;
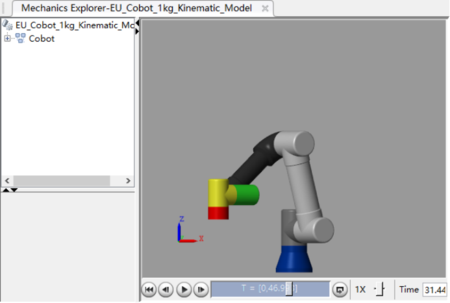
u 内置高精度动力学仿真模型,支持虚拟调试与物理实体同步验证;
u 支持从算法仿真到真实机械臂部署的无缝衔接,强化工程实践能力;
u 全开源代码与硬件设计,支持用户自定义控制器、通信协议及传感器扩展;
u 集成机器视觉软件,支持手眼标定、物体识别等AI融合实验;
主要实验:
《机器人学》、《运动控制系统》课程目录
n 机器人运行学正逆解实验
n 机器人坐标变换实验
n 机器人工作空间实验
n 机器人动力学建模与验证
n 机器人关节轨迹插值实验
n 机器人笛卡尔空间轨迹规划实验
n 机器人雅可比实验
n 机器人位置闭环控制
n 机器人视觉抓取等实验