
智能服务机器人
产品详情
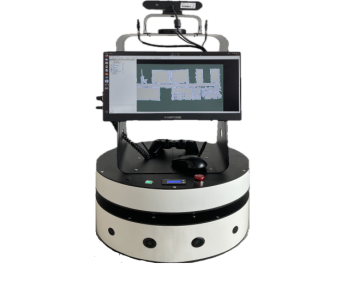
ROS智能服务机器人平台JK-HS602
一、概述
智能服务机器人是一款以室内服务机器人为应用背景的智能开源机器人平台,它搭载了上下两层控制器以及服务机器人所需的所有传感器,预装了ROS机器人操作系统,提供了完整的教学课程方案,旨在为高校移动机器人教学提供一个开源的服务机器人教学平台。
适用课程:《机器人操作系统》、《智能服务机器人综合开发》等相关课程或相关课程设计的教学实验平台。
二、主要技术指标:
u 整体参数:377mm*377mm*600mm
u 重量:12kg;
u 最大移动速度:1.2m/s;
u 整机最大功率:100W;
u 移动形式:差动控制;
u 满功率连续运行时间:3h;
u 待机时间:4h;
u 供电电压:24V;
u 软件系统:ROS
u 传感器:激光雷达、深度相机、麦克风阵列、烟雾、温湿度、超声波、相机等
三、实验内容:
一、传感器采集实验 | 八、语音识别服务开发 |
二、底盘控制实验 | 九、语音控制应用开发 |
三、两轮差速运动学以及里程计编写 | 十、机器人系统构建与虚拟机器人建模 |
四、ROS通讯机制-话题 | 十一、未知环境探索应用开发 |
五、地图构建 | 十二、人体识别与跟踪应用开发 |
六、自主导航 | 十三、迎宾引导机器人系统开发 |
七、语音采集以及端点检测服务开发 | 十四、多机器人协作编队应用开发 |