
具身智能双臂复合机器人
产品详情
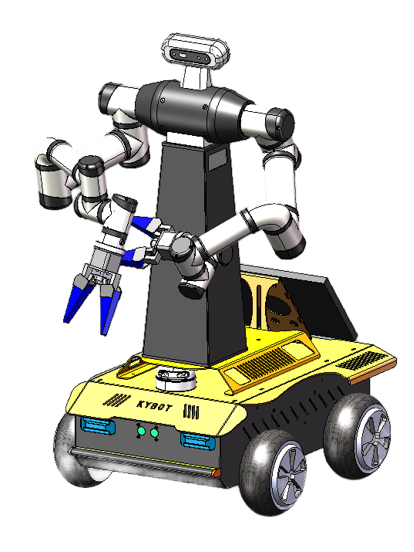
具身智能双臂复合机器人JK-HS601S
一、产品概述
移动双臂复合机器人开发平台是协作机械臂和移动机器人集成产品。平台搭载2台6轴协作机械臂,具备单臂独立操作和双臂协同操作能力;以四驱移动机器人为载体,具备运动、导航、避障能力。同时平台集成了语音模块和深度视觉,赋予双臂机器人语音交互与视觉感知能力,从而满足科研对智能感知与移动操作的需求。
二、产品特点:
n 产品搭载激光雷达、深度相机、超声波等多种传感器,基于ROS机器人操作系统,具有场景建图和路径规划功能,方便与机械臂协同控制。
n 四驱移动底盘,运动稳定性和负载能力可以满足基本需求。
n 平台采用超轻量六轴协作机械臂,质量轻、负载高、功耗低,驱控一体化设计;具有开发API,支持ROS机器人操作系统;
n 搭载语音和视觉感知传感器,可以方便验证具身智能技术的相关算法,控制机器人完成特定任务。
n 开源软硬件架构,配备丰富的软硬件接口,支持ROS二次开发,可满足不同场景下的集成开发需求。